OpenAI从最强辅助到下场玩家!Sam Altman:Sora开发者领队,重返机器人赛道!网友:我更愿意把机器人技术交给马斯克
OpenAI从最强辅助到下场玩家!Sam Altman:Sora开发者领队,重返机器人赛道!网友:我更愿意把机器人技术交给马斯克“OpenAI 进军机器人领域!”
来自主题: AI资讯
6441 点击 2026-06-01 14:59
 搜索
搜索
“OpenAI 进军机器人领域!”

连续创业的 York 开启了又一段新征程。过去十几年里,他几乎一直在做软硬一体系统:从计算机视觉、嵌入式,到后来的机器人。他的上一个创业项目——智能购物车 Caper AI,在 2021 年被 Instacart 以 3.5 亿美元收购。
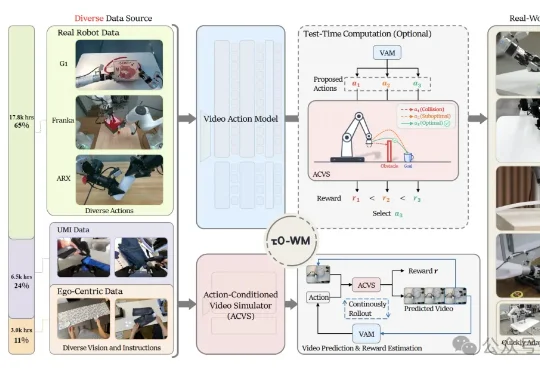
刚刚,上海创智学院副教授、智元机器人首席科学家罗剑岚带队,发布全球最大规模的开源预训练具身世界模型——τ0-World Model(τ0-WM)。整个τ0-WM参数量达到5B,预训练数据规模高达约3万小时。其中,真机遥操作数据第一次成了绝对主力,占到了1.78万小时。
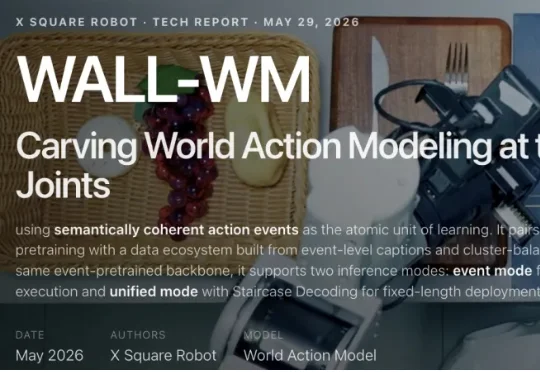
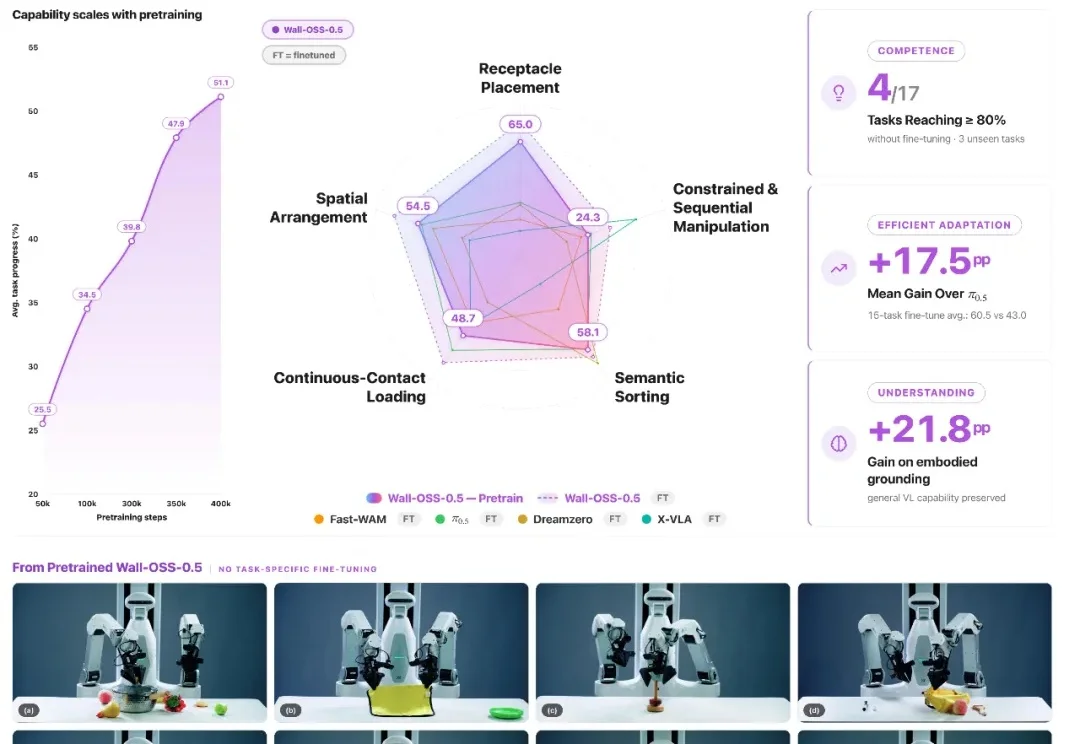
刚刚,自变量机器人团队带来全新解法——发布全球首个「事件级预测」具身智能世界模型WALL-WM。WALL-WM把世界模型的预测单位从时间帧换成了语义事件:
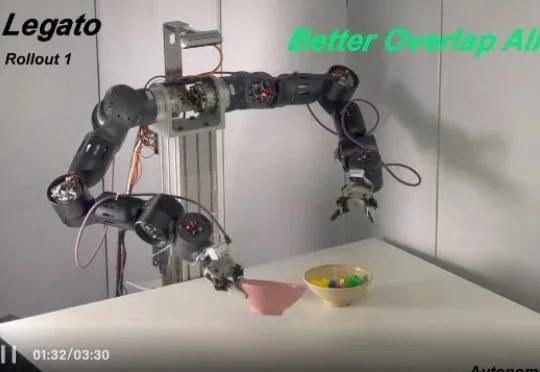
近日,千寻智能高阳团队的研究成果 《Learning Native Continuation for Action Chunking Flow Policies》 被机器人顶会 RSS 2026 接收!这项工作从训练机制出发,让机器人动作天然具有连续性,实现了 "连音" 般的流畅执行,在五个真实世界操作任务上超越了现有方法,为具身智能领域的动作生成研究提供了新的思路。
真实世界需要 200 多个小时的模型评测任务,可以在仿真中不到 0.5 小时内完成。

后空翻、跑酷、单手抓举几十公斤……
2026 年初,国内具身智能赛道掀起了一波开源潮,越来越多团队开始公开自己的视觉-语言-动作(VLA)模型、数据集与训练框架。与此同时,行业竞争也逐渐集中到 benchmark 成绩、任务成功率以及跨任务泛化能力上,尤其是在标准化或已训练任务中的表现。
8.99万元操作天花板,6月发货,具身智能的「苹果时刻」!中国版Figure,星尘智能自研「AI模型-具身OS-绳驱本体」三位一体架构,用击穿底线的定价,推动Physical AI落地。一句话:今年必Buy!
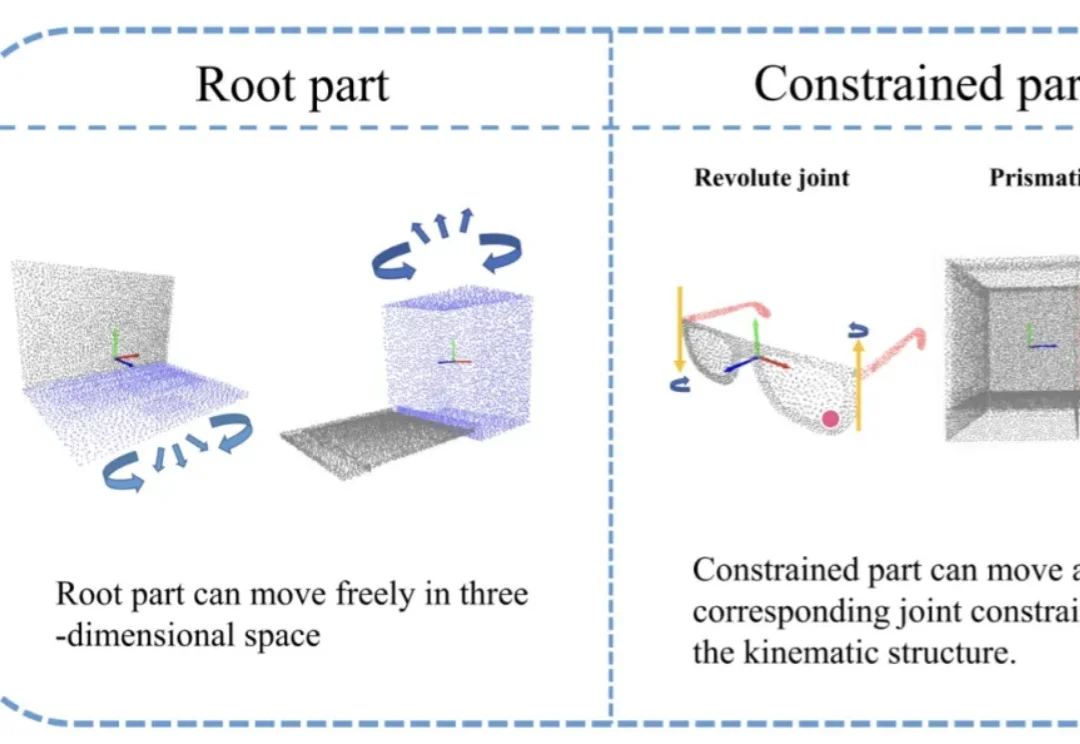
在具身智能快速发展的今天,机器人已经不再满足于「看见」刚体物体,而是开始真正走向复杂环境中的交互与操作。从机械臂开柜门,到服务机器人整理抽屉,再到工业场景中的工具操作,大量真实世界目标都属于关节物体(Articulated Objects)。