在 AI 应用普遍喊难的当下,这 15 个应用找到了不一样的活法
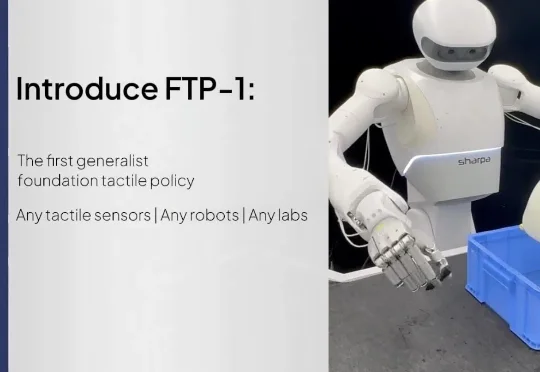
在 AI 应用普遍喊难的当下,这 15 个应用找到了不一样的活法15 个来自火山引擎 V-START 加速器的项目,横跨具身智能、AI 陪伴硬件、Agent 工具、内容生成、AI 教育等赛道。都在各自的场景里,把模型能力变成了用户愿意持续使用甚至付费的产品体验,要么扎进了模型短期内替代不了的物理世界,要么在垂直场景里把 Agent 做到了用户真正愿意持续用的程度,要么用 AI 重构了一个原本就有刚需的消费品类。
来自主题: AI资讯
8845 点击 2026-06-28 11:36