
这个一句话生成3D游戏的产品在北美爆了。
这个一句话生成3D游戏的产品在北美爆了。最近体验了一个 AI 工具的内测版本,确实跟之前见到的AI产品不太一样。 它做的事情是:一句话,生成一个完整可玩的3D游戏。
来自主题: AI资讯
8599 点击 2025-08-14 10:22
 搜索
搜索
最近体验了一个 AI 工具的内测版本,确实跟之前见到的AI产品不太一样。 它做的事情是:一句话,生成一个完整可玩的3D游戏。
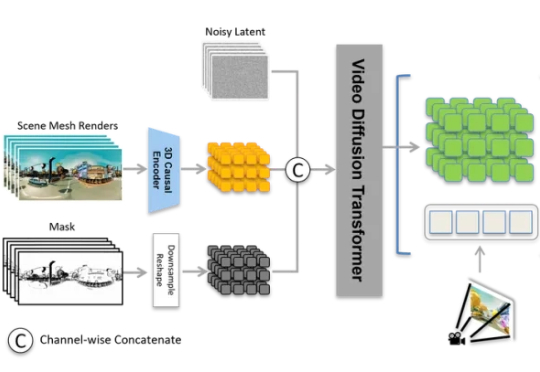
3D生成的行业新标杆,这一次由国产玩家树立。 万万没想到,这样一个堪比游戏全景视角的场景,竟然只由一张图片生成?!

中国自研世界模型Matrix-3D只需单张图就能生成可自由探索的3D世界,不仅效果对标李飞飞的World Labs,而且还能实现更大范围的探索空间,率先进入AI理解世界的前沿领域。
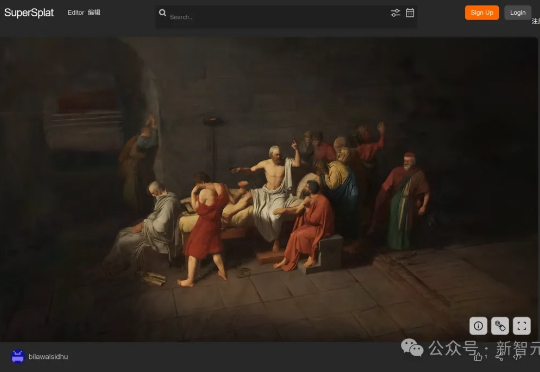
谷歌最新发布的Genie 3世界模型,正以惊人AI能力颠覆想象:从文本生成交互式空间,到进入经典名画如《苏格拉底之死》和《夜游者》自由探索,甚至训练3D模型实现沉浸式体验!
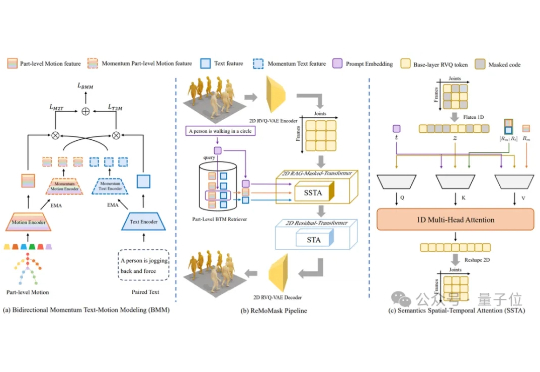
北京大学提出了ReMoMask:一种全新的基于检索增强生成的Text-to-Motion框架。它是一个集成三项关键创新的统一框架:(1)基于动量的双向文本-动作模型,通过动量队列将负样本的尺度与批次大小解耦,显著提高了跨模态检索精度;(2)语义时空注意力机制,在部件级融合过程中强制执行生物力学约束,消除异步伪影;(3)RAG-无分类器引导结合轻微的无条件生成以增强泛化能力。
只需一句话,就能生成可实时交互的3D世界。 刚刚,谷歌DeepMind发布了新一代通用世界模型Genie 3。
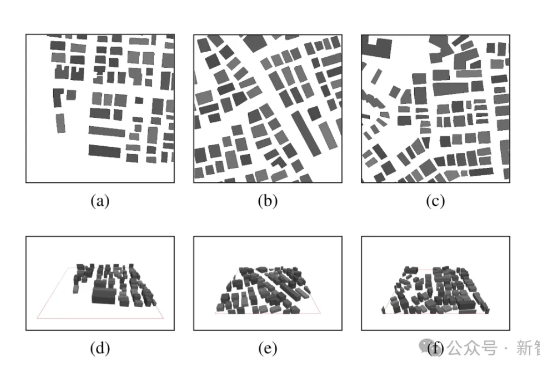
当前环境感知通信正逐步成为第六代移动通信系统(6G)的核心使能技术之一。为支撑其在复杂三维环境下的部署需求,西安电子科技大学、香港中文大学(深圳)和加拿大滑铁卢大学的研究团队联合提出了一个面向6G的高分辨率多模态三维无线电图谱数据集UrbanRadio3D,并构建了基于扩散模型的三维无线电图生成框架RadioDiff-3D。
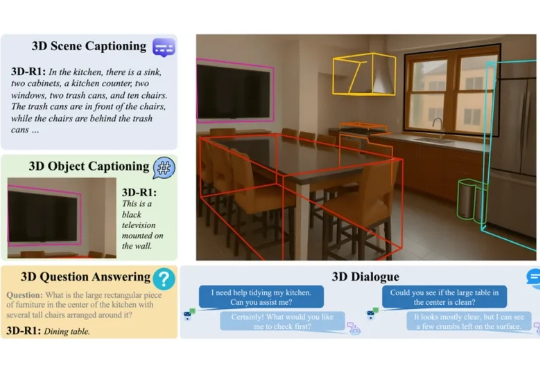
在人工智能快速发展的今天,我们已逐渐习惯于让 AI 识别图像、理解语言,甚至与之对话。但当我们进入真实三维世界,如何让 AI 具备「看懂场景」、「理解空间」和「推理复杂任务」的能力?这正是 3D 视觉语言模型(3D VLM)所要解决的问题。
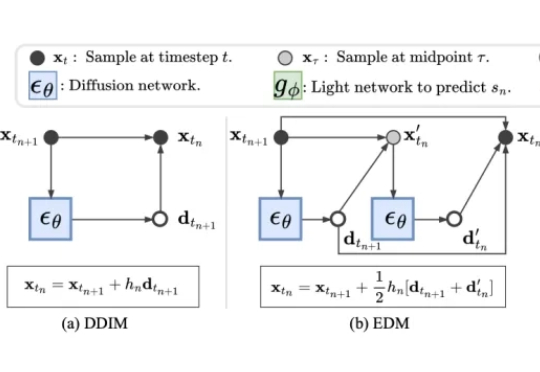
近年来,扩散模型(Diffusion Models)凭借出色的生成质量,迅速成为图像、视频、语音、3D 内容等生成任务中的主流技术。从文本生成图像(如 Stable Diffusion),到高质量人脸合成、音频生成,再到三维形状建模,扩散模型正在广泛应用于游戏、虚拟现实、数字内容创作、广告设计、医学影像以及新兴的 AI 原生生产工具中。

在高质量3D生成需求日益增长的背景下,如何高效生成结构精良、几何精细的三维资产,已成为AIGC和数字内容创作领域的关键挑战。